Now try to read from the Arduino using the Test Modbus button. The arduino starts at register 1 and initially has only 1 register.

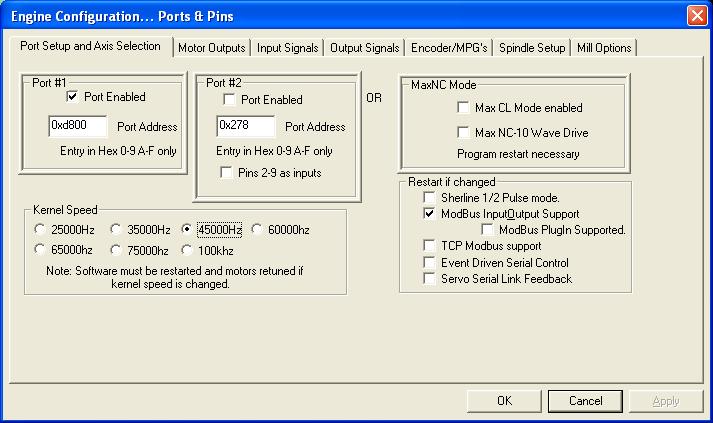
Setup the Comm Port setting per above, but don’t bother with anything else. We will manually test the Modbus now.
I set the Slave Addr to 1 the Start to 1 and the Num Regs to 1. I clicked read and got 0000 with no errors. All registers are 16 bit integers and by default they are displayed in hex format. I changed 0000 to 1100 and clicked Write. I then cleared the number and clicked Read. I got 1100 back. This meant both read and write were working.
Modifying the Arduino code.
I changed some Arduino code to allow more registers by adding “ = 6” after MB_REGS.
enum {
MB_REG0,
MB_REG1,
MB_REGS = 6 /* total number of registers on slave */
};
Now I was able to read and write multiple registers. To have a little more fun a wrote a function that runs every time a write command was received. One register toggled an LED and the other set the value of a PWM. That worked perfectly.
Automating the Modbus
That is all cool and fun, but manual control is not gaining us much. Now it is time to put Mach3 in automatic control of it. To do this we will write a macro that is triggered from G-Code. I wrote a macro the would run whenever Mach3 encountered a special bit of G-Code. I chose to use an M666 code. I would use that with a “P” parameter for the PWM value. So “M166 P50″ would set the PWM value to 50.
The code is very simple. It reads the parameter. Param1() always gets “P” parameters. It then sends the value out via the second register in the slave Modbus device.
 Edit the post processor
Edit the post processor
The next task is to create a post processor to create the custom G-Code. I used Vectric Cut2D as my CAM program for this exercise.
First I setup the spindle speed to output as Pxxxx. The + sign comments out the original post processor line.
+VAR SPINDLE_SPEED = [S|A|S|1.0]
VAR SPINDLE_SPEED = [S|A|P|1.0]
The next change is to add the new M666 line before each first feed move to set the power level.
begin FIRST_FEED_MOVE
“[N]M666 [S]“
Next steps
The next step is to use a Mach3 feature called “Brains”. This is a ladder logic type programming method that works much faster than macros and can run in parallel with Mach3. This can allow some really interesting ideas.
Possible Future Ideas.
- Tie power level to feed rate. When a move starts out it accelerates to the desired feed rate. Therefore the power per speed is not constant. A Brain could adjust for this.
- Control beam enable on with “is move G1″ logic. Rather than using the E1P1 method common with many laser users, you could have a Brain toggle the beam on whenever the code is in a G1 move.
- Return water temp to Mach3. The Arduino could read water temp and Mach3 could display it on in a DRO. Mach3 could act on a high temperature value and do a feed hold and turn off the beam.
- LCD display. The Arduino could control a simple LCD display of feed rates, power levels, axes positions.
- Jog buttons. A simple jog button panel could be implemented.
- Feed rate offset. A pot could be used to adjust the feed rate plus or minus while the job is running.
- Feed hold with beam off: A feed hold button could be implemented where the motion stop and the beam goes off at the same time.


 33 لایک
33 لایک  LinkBack URL
LinkBack URL About LinkBacks
About LinkBacks





 پاسخ با نقل قول
پاسخ با نقل قول